[ROS2] ROS2 실습 - Publisher, Subscriber
ROS2로 간단한 publisher와 subscriber를 작성해본다.
1. 워크스페이스 생성하기
아래 명령어를 통해 새로운 워크스페이스를 생성한다.
1
2
3
mkdir -p ros2_ws/src # 워크스페이스 생성
cd ros2_ws
colcon build # 초기화
워크스페이스를 초기화하게 되면 워크스페이스 내에 자동으로 build, install, log 폴더가 생성된다.
워크스페이스 구조?
build : 패키지와 소스코드가 빌드되는 중간 파일들이 저장되는 디렉토리 install : 빌드된 패키지와 소스코드가 설치되는 디렉토리 log : 빌드 및 실행 중에 생성된 로그 파일이 저장되는 디렉토리 src : ROS 패키지의 소스코드들이 저장되는 디렉토리
이제 src 폴더 내에 패키지를 생성한다. 만약 파이썬 패키지를 생성하기를 원한다면 build-type을 ament_python으로 한다. 나의 경우에는 C++ 패키지를 생성하려고 한다.
1
2
3
cd src
# ros2 pkg create --build-type [빌드_타입] [패키지명]
ros2 pkg create --build-type ament_cmake cpp_pubsub
그리고 새로 생성한 패키지를 포함해서 워크스페이스를 다시 빌드해준다. 이를 통해 빌드된 패키지의 결과물이 install 폴더에 저장된다.
1
2
cd ../
colcon build
재빌드 시 에러 발생?
/usr/local/bin/cmake: error while loading shared libraries: libssl.so.1.1에러가 발생한다면 이는 OpenSSL 1.1이 설치되어 있지 않아서 발생하는 에러이다. 설치 후 재시도하자.
설치 방법 참고
이후 install/setup.bash 파일을 소싱하여 설치된 패키지를 활성화해준다.
1
2
3
4
# 새로운 터미널을 연 후
cd ros2_ws/install
. setup.bash # 활성화
ros2 pkg list # 해당 터미널에 한해서만 패키지가 활성화되기 때문에 다른 터미널에서 시도하면 패키지가 보이지 않는다.
이로써, 설치된 ros2와 개발에 사용된 모든 패키지가 포함된 오버레이 워크스페이스가 된다. 즉, 작업 공간의 코드와 패키지들이 ros2에서 인식된다.
2. Publisher
이제 생성된 패키지 내에 새로운 노드를 생성해보자. ros2_ws/src/cpp_pubsub/src/ 안에 새로운 파일 simple_publisher.cpp를 생성해준다. 매 초마다 메세지를 publish하는 publisher를 만들고자 한다.
2-1. Publisher 클래스 생성하기
가장 먼저 C++에서의 ROS2 라이브러리를 포함시켜 ROS2 시스템을 사용할 수 있도록 한다.
1
#include <rclcpp/rclcpp.hpp>
그리고 새로운 노드 클래스를 정의한다. 생성자를 통해 노드의 이름을 simple_publisher로 하고, publish할 토픽의 이름을 chatter로, 큐의 크기를 10으로, 그리고 전송할 메세지 타입을 std_msg::msg::String으로 정의한다.
1
2
3
4
5
6
7
8
9
10
11
#include <std_msgs/msg/string.hpp>
class SimplePublisher : public rclcpp::Node {
public:
SimplePublisher() : Node("simple_publisher") {
pub_ = create_publisher<std_msgs::msg::String>("chatter", 10);
}
private:
rclcpp::Publisher<std_msg::msg::String>::SharedPtr pub_;
};
스마트 포인터(`SharedPtr)란?
C++ 표준 라이브러리에서 제공하는 포인터로 객체의 메모리를 관리하는데 유용하다. 객체가 더 이상 사용되지 않으면 자동으로 메모리를 해제한다. 주로 동적으로 생성하는 객체에 사용된다.
해당 메세지를 1초당 전송하기 위해 시간과 관련된 C++ 표준 라이브러리 chrono를 사용한다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
#include <chrono>
using namespace std::chrono_literals;
class SimplePublisher : public rclcpp::Node {
public:
SimplePublisher() : Node("simple_publisher"), counter_(0) {
pub_ = create_publisher<std_msgs::msg::String>("chatter", 10);
// 1초당 함수 timeCallBack()을 호출하는 타이머 생성
timer_ = create_wall_timer(1s, std::bind(&SimplePublisher::timerCallback, this));
RCLCPP_INFO(get_logger(), "publishing at 1 Hz");
}
private:
unsigned int counter_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr pub_;
rclcpp::TimerBase::SharedPtr timer_;
void timerCallback() { // 메세지를 publish하는 함수
auto message = std_msgs::msg::String();
message.data = "Hello ROS2 - counter: " + std::to_string(counter_++);
pub_->publish(message);
}
};
2-2. main 함수 생성
정의한 SimplePublisher 클래스의 인스턴스를 호출해 사용할 수 있도록 하자. 그전에 ROS2 시스템을 초기화해준다.
1
2
3
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
}
이후, SimplePublisher 노드가 종료될 때까지 이벤트를 실행하고, 노드가 종료되면 ROS2 시스템도 종료한다.
1
2
3
rclcpp::spin(std::make_shared<SimplePublisher>()); // 노드 실행
rclcpp::shutdown(); // ROS2 시스템 종료
return 0;
2-3. CMakeLists.txt 작성하기
소스코드가 모두 작성되었으니 이제 CMakeLists.txt에 이를 빌드하기 위한 설정을 작성해준다. project(cpp_pubsub)는 프로젝트의 이름을 설정하며 이는 나중에 설치나 빌드 작업에서 사용된다. 빌드 시에 사용하는 패키지들 모두를 find_package()를 통해서 작성하며, REQUIRED를 통해 해당 패키지가 필수임을 나타낸다.
1
2
3
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
소스코드 src/simple_publisher.cpp를 통해 실행파일 simple_publisher를 생성하며, 이 소스코드가 의존하는 패키지들을 정의해준다.
1
2
add_executable(simple_publisher src/simple_publisher.cpp)
ament_target_dependencies(simple_publisher rclcpp std_msgs)
실행파일 simple_publisher가 빌드되면, 이를 설치 디렉토리 lib/cpp_pubsub에 설치하도록 작성한다. ${PROJECT_NAME}은 위에서 정의한 cpp_pubsub을 의미한다.
1
2
3
4
install(TARGETS
simple_publisher
DESTINATION lib/${PROJECT_NAME}
)
2-4. package.xml 작성하기
package.xml 파일은 패키지의 의존성 관리를 담당한다. 해당 파일 안에 사용한 패키지들을 정의해준다.
1
2
3
<!-- buildtool_depend 바로 아래에 작성한다. -->
<depend>rclcpp</depend>
<depend>std_msgs</depend>
2-5. 실행 결과
1
2
3
4
5
6
cd ros2_ws
colcon build
# 새 터미널 열기
source ros2_ws/install/setup.bash
# ros2 run [패키지명] [실행파일명]
ros2 run cpp_pubsub simple_publisher

publish 되고 있는 메세지를 확인하고 싶다면 아래 명령어를 통해 확인할 수 있다.
1
2
3
# ros2 run ...을 실행중인 상태에서 새 터미널을 열고 아래 명령어들 입력
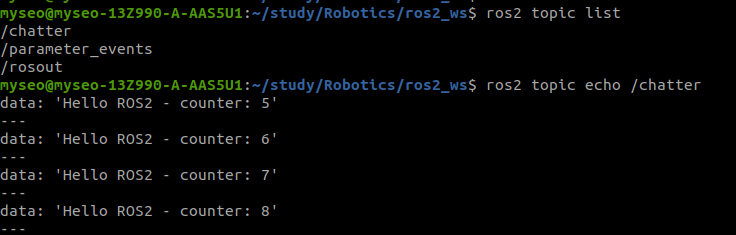
ros2 topic list # 현재 publish 중인 토픽 확인하기
ros2 topic echo /chatter # 토픽의 메세지 읽기
publish 되고 있는 토픽에 대한 정보를 알고 싶다면 아래 명령어를 입력한다.
1
2
ros2 topic info /chatter --verbose # 토픽에 대한 전체 개요 확인
ros2 topic hz /chatter # 해당 토픽이 몇 hz로 메세지를 publish하는지 확인
3. Subscriber
터미널로 메세지를 읽는게 아닌 특정 토픽을 subscribe하는 subscriber 노드를 생성해보자. 먼저 노드를 생성하기위해 ros2 기본 라이브러인 rclcpp와 메세지 타입인 std_msgs 패키지를 포함한다.
1
2
#include <rclcpp/rclcpp.hpp>
#include <std_msgs/msg/string.hpp>
3-1. Subscriber 클래스 생성하기
이제 토픽 chatter로부터 메세지 타입이 std_msg::msg::String인 메세지를 읽어서 이를 출력해주는 subscriber 클래스를 정의해준다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
using std::placeholders::_1;
class SimpleSubscriber : public rclcpp::Node { // subscriber 클래스
public:
SimpleSubscriber() : Node("simple_subscriber") {
sub_ = create_subscription<std_msgs::msg::String>("chatter", 10, std::bind(&SimpleSubscriber::msgCallback, this, _1));
}
private:
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr sub_;
void msgCallback(const std_msgs::msg::String &msg) const { // 읽은 메세지 출력하기
RCLCPP_INFO_STREAM(get_logger(), "I heard: " << msg.data.c_str());
}
};
std::placeholder은 std::bind()와 함께 사용되며, 매개변수의 자리 표시자를 의미한다. 이는 create_subscrition이 메세지를 받으면 이를 msgCallback 함수의 첫 번째 인자(_1)인 const std_msgs::msg::String으로 전달된다.
3-2. main 함수 생성
publisher와 마찬가지로 subscriber 노드를 생성 후, 노드가 종료될 때까지 계속 실행한다.
1
2
3
4
5
6
7
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
auto node = std::make_shared<SimpleSubscriber>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
3-3. CMakeLists.txt 작성하기
publisher를 빌드하기 위해서 사용한 CMakeLists.txt에 subscriber 노드에 대해서도 빌드를 할 수 있게 아래 코드를 추가해준다.
1
2
3
4
5
6
7
8
add_executable(simple_subscriber src/simple_subscriber.cpp)
ament_target_dependencies(simple_subscriber rclcpp std_msgs)
install(TARGETS
simple_publisher
simple_subscriber
DESTINATION lib/${PROJECT_NAME}
)
3-5. 실행 결과
1
2
3
4
5
6
7
8
9
cd ros2_ws
colcon build
# 새 터미널 열기
source ros2_ws/install/setup.bash
# ros2 run [패키지명] [실행파일명]
ros2 run cpp_pubsub simple_subscriber
# 새 터미널 열기
source ros2_ws/install/setup.bash
ros2 run cpp_pubsub simple_publisher

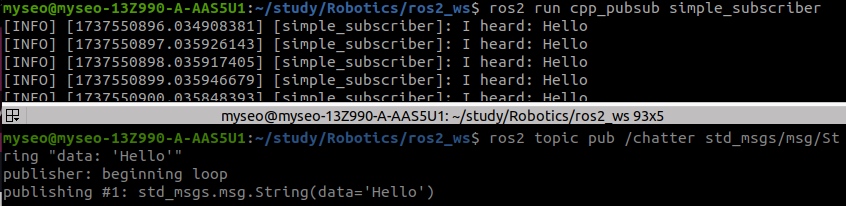
이때, publisher 노드와 subscriber 노드가 서로 다른 언어로 작성되었어도 publish한 메세지를 subscribe 가능하다. 그리고 만약 publisher가 아니라 터미널로 하나의 메세지를 publish하고 싶다면 아래의 명령어를 입력한다.
1
2
# ros2 topic pub [토픽] [메세지_타입] [메세지_형식+메세지] -> tab tab으로 힌트를 얻을 수 있음
ros2 topic pub /chatter std_msgs/msg/String "data: 'Hello'"
publish되고 있는 토픽에 대한 정보를 알고 싶다면 아래 명령어를 입력한다.
1
2
ros2 topic info /chatter --verbose # 토픽에 대한 전체 개요 확인
ros2 topic hz /chatter # 해당 토픽이 몇 hz로 메세지를 publish하는지 확인
4. 전체 코드
참고
ROS2 Documentation의 Beginner:Client libraries